以下は、適切な電動グリッパーの選び方を説明するプラットフォームです。
[Q] 適切な電動グリッパーを素早く選択するにはどうすればよいですか?
【回答】 5つの条件で簡単に選択できます。
① ワークの重量に応じてクランプ力を選択します。
② ワークサイズに応じてクランプストロークを選定します。
③ 使用シナリオに応じて適切な電動グリッパーとサイズを選択します。
④ グラブ要件に応じて機能項目を選択します(電源オフセルフロック、エンベロープ適応、無限回転など)。
⑤ 使用環境の要求に応じて、IP レベルに適合した電動グリッパを選択します。
【Q】効果的な旅程とは何ですか?
【回答】 グリッパーの指先が自由に動かせる最大の範囲です。グリッパジョーのストロークが指先の移動に必要な最大距離より大きい場合は、そのストロークのグリッパが適しています。
【Q】電動グリッパは内径クランプには対応していますか?
【回答】 電動グリッパは内径クランプに対応しており、開閉時の力制御と速度制御が可能です。
【Q】ロータリーグリッパーが対応する回転角度は何ですか?
【回答】 回転電動グリッパ RGI シリーズは無限回転に対応しています。
【Q】電動グリッパーにはどのようなモーターが使われていますか?
【回答】 高エネルギー密度の永久磁石同期DCモータを使用してください。高効率のスロットレス設計を採用しています。ステッピングモーターや通常のサーボモーターと比較して、高い連続トルク、高効率、正確な速度調整、小型、軽量、低摩擦損失、優れた動的加減速性能を備えています。アドバンテージ。
【Q】電動グリッパーの精度はどのくらいですか?
【回答】 クランプ位置の再現性はプラスマイナス0.02mm(ワイヤ2本)まで可能です。位置分離率はプラスまたはマイナス 0.03 mm (ワイヤ 3 本) に達します。力制御精度は最大 0.1N に達します (世界の製造業におけるトップ 10 顧客の量産検証に合格)。
【Q】エア爪と比べて電動爪のメリットは何ですか?
【回答】 ① 電動グリッパは精密な力制御が可能であり、薄い部品や壊れやすい部品など、把持力制御が要求されるものは部品にダメージを与えることがありません。
②電動グリッパーはクランプストロークを弾性的に調整し、異なるサイズの部品のクランプを実現します。
③電動グリッパーのクランプ速度は制御可能であり、作業効率を向上させるためにインテリジェントに計画できます。
④バスに直接接続された電動グリッパーの駆動制御統合設計により、生産ラインの配線が大幅に簡素化され、スペースが大幅に節約され、クリーンで安全です。
⑤ 電動グリッパはエアチャックに比べて消費電力が大幅に低くなります。
小さなボディ、大きなエネルギーの電動アクチュエータ
1. 製品紹介
小型サーボ電動アクチュエータは、マイクロモータ、遊星減速機、ネジ機構、センサ、駆動・制御系を一体化しており、ストローク範囲内の任意の位置で正確なサーボ制御を実現します。絶対位置センサを内蔵しているため、停電後も位置情報が失われることがなく、ゼロ調整操作も必要ありません。
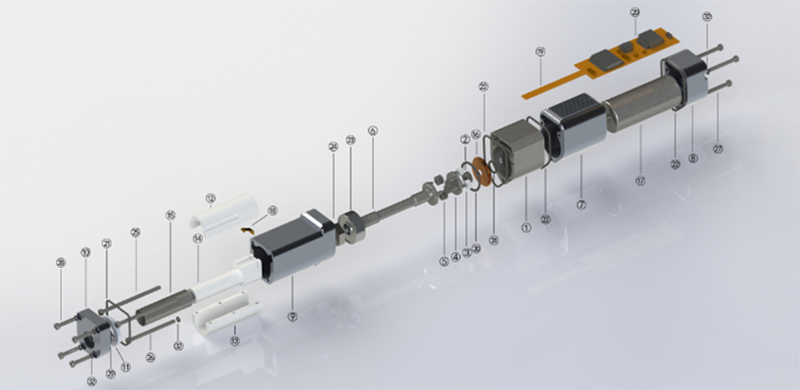
マイクロリニアアクチュエータ構造図
マイクロサーボアクチュエータの駆動と制御の統合設計、小型、高出力密度、高精度フォースフィードバック、および高位置決め精度。
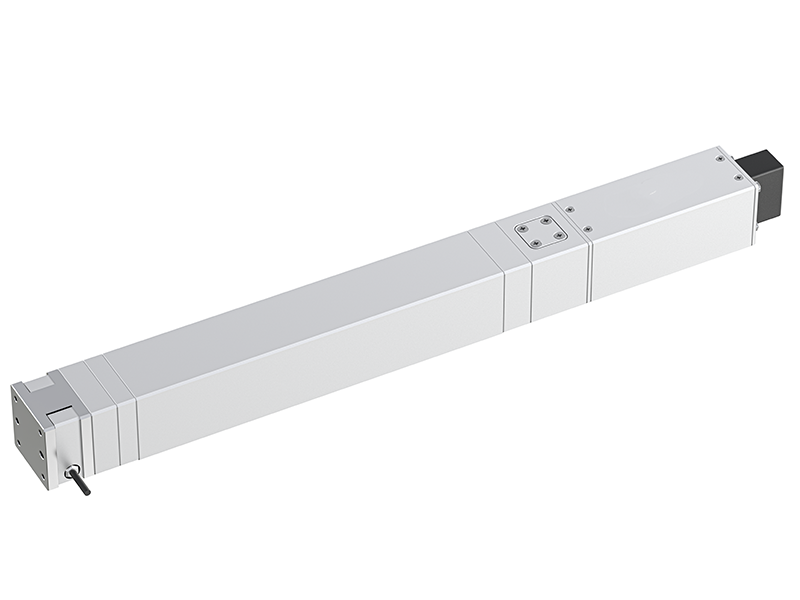 マイクロリニアアクチュエータの図
マイクロリニアアクチュエータの図
2. 主な利点
①中国で最高の出力密度を備えた小型サーボ電動アクチュエータ。
②最高の繰り返し位置決め精度はミクロンレベルに達します。
③ 高度な統合により、アプリケーションエンジニアは機器の機能開発に集中できます。
④豊富な機械的インターフェースと電気的インターフェースを備えています。
⑤100機種以上で様々な応用分野のニーズに対応します。
⑥現地生産、安定納期、特殊カスタマイズ対応。
3. 製品の適用方向
主な用途: 医療産業、科学研究と教育、産業オートメーション、航空宇宙、家庭用電化製品。
4. リニアアクチュエータの動作原理は何ですか?
マイクロリニアアクチュエータは、マイクロモータ、減速機、ネジ機構、センサ、駆動制御系を一体化したマイクロサーボ電動プッシュロッドで、ストローク範囲内の任意の位置で正確なサーボ制御を実現します。絶対位置センサを内蔵しているため、停電後も位置情報が失われることがなく、ゼロ調整操作も必要ありません。
5. 機能別に分けるとどのシリーズに分かれますか?
ミニチュアリニアサーボドライブは機能により標準タイプと力制御タイプの2シリーズに分類されます。対応する信号取得およびフィルタリング アルゴリズムにより、マイクロ リニア サーボ ドライブの実際の力を検出できます。
投稿日時: 2023 年 2 月 4 日