現在、市場に出回っているほとんどのアクチュエータには、次の 2 種類の力制御方式があります。
1. 電流ループ力制御
モータの内部電流を調整することで力制御を実現する、比較的容易に実現できる従来の力制御方式です。利点は、実装がそれほど難しくなく、5% ~ 15% の精度の範囲内で力制御を達成できることです。欠点は、移動速度が遅く、逆駆動できないこと、およびより高い精度が要求される一部のシナリオのニーズを満たすことができないことです。一定期間使用すると、機械的磨耗により誤差が生じ、精度がさらに低下します。
このようなアクチュエータには通常、センサーが搭載されておらず、センサーがあったとしても力の「表示」としてのみ使用され、制御には関与しません。たとえば、プレスにセンサーを追加すると、センサーは力の大きさを読み取り、その値をメーターに表示します。これは、力の大きさの手動調整を支援するために使用されますが、そのような調整は一般に何の関係もありません。力の正確さで。

概略図。グラフィックスやテキストとは関係ありません
2. センサー閉ループ力制御
別の力制御方法は、従来の力センサーと従来の閉ループ制御アルゴリズムを追加することです。メリットは精度が上がることですが、デメリットはやはり速度が遅いことです。このようにして、力制御精度を 5% から 1% に高めることができます。正しいアルゴリズム処理がない場合、またはセンサー速度が十分に速くない場合、「オーバーシュート」が発生する傾向があります。
力制御アクチュエータ
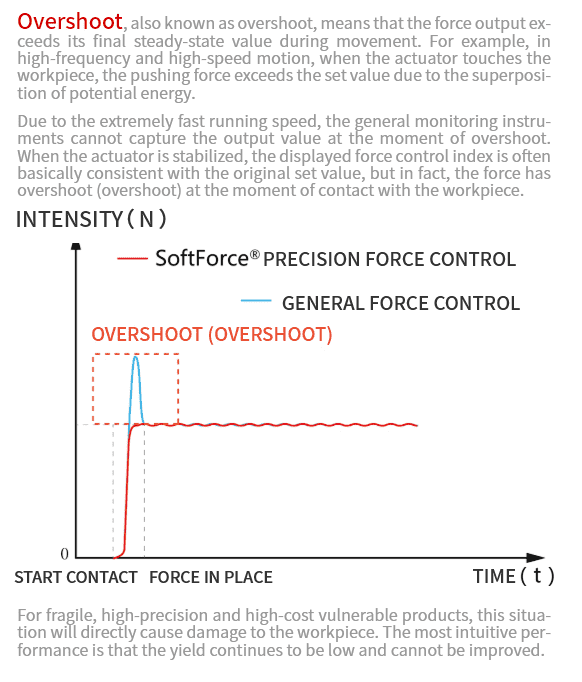
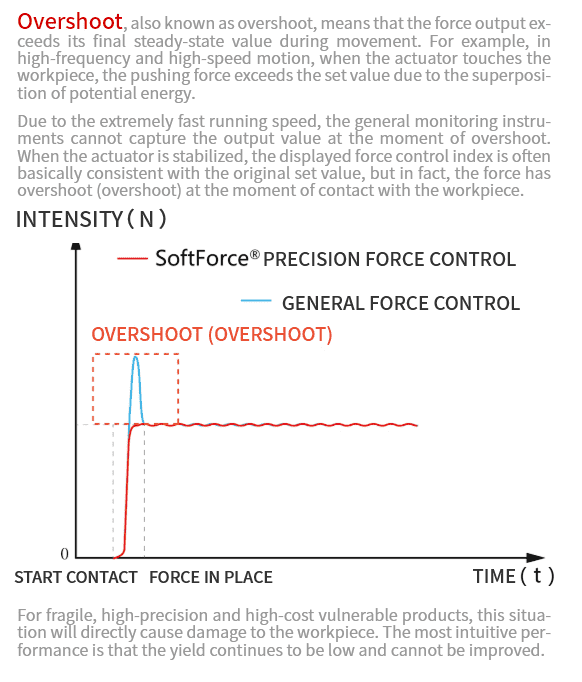
避けられない「オーバーシュート」?
センサの閉ループ力制御方式では衝撃力に対処することが困難です。最も直接的に現れるのは、ハイテンポが要求されるシーンを扱うときに「オーバーシュート」が非常に発生しやすいことです。
例えば
一般に高速、大出力の場合、アクチュエータがワークに接触する瞬間が特に大きくなることが多い。例えば、アクチュエータの押付け力を 10N に設定した場合、ワークに接触した時点で 11N、12N に到達しやすく、その後制御アルゴリズムにより 10N に戻ります。このような問題は、力センサーやいわゆる力制御アクチュエーターが市場に追加されるときによく発生します。
これは応答速度が十分に速くないという問題です。高速性と高精度で安定した出力は相反するものです。オーバーシュート(オーバーシュート)がある場合、正確な力を加えても意味がありません。
特に精密機器の加圧組立工程や壊れやすい部品、高価な部品などでは、一般的にオーバーシュートは許されません。
オーバーシュートのないフルフォースコントロール、高周波、高速?
TAはどうやってやるのでしょうか?
高精度のアプリケーションシナリオでは、高速かつ高精度の要件を考慮した「ソフトランディング」方式、つまりセグメント化された力の制御が採用されています。アクチュエータは位置動作モードでワークに素早く接近し、ワークに接触しそうな位置で素早く力制御モードに切り替わり、設定値に達するまで徐々に出力を増加させます。位置モード+力制御モード+力安定時間の合計時間がアクチュエータの単体実行効率となります。
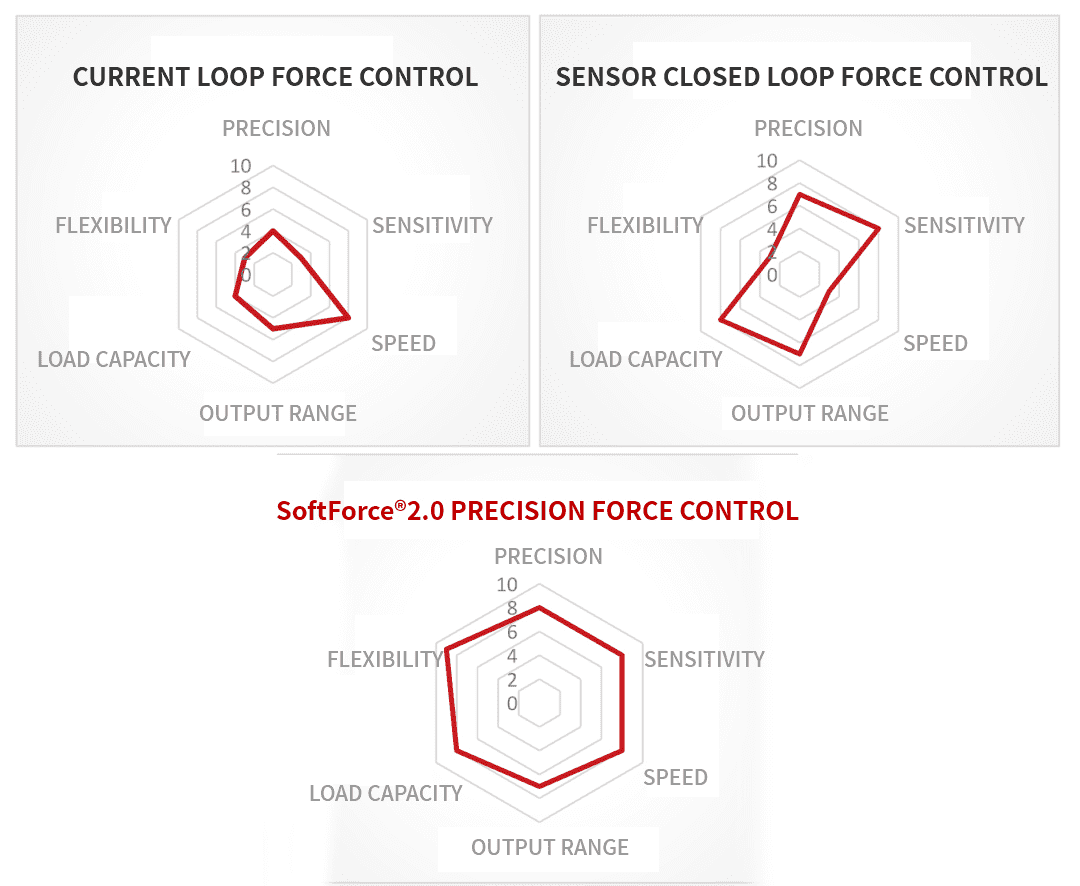
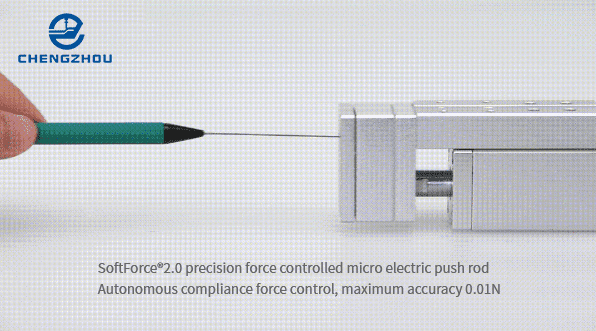
高速力センサーとモデルベースの予測制御アルゴリズムを組み合わせた SoftForce®2.0 高精度力制御アクチュエーターは、アクチュエーターの位置とワークピースとの接触状態を自動的に識別できるため、アクチュエーターは自動化の最終段階となります。人間の手と同じ機能を持つ装置です。触覚の知覚、制御、および実行の知能。
同じ距離で、「SoftForce ®2.0 Precision Force Control」のソフトランディング速度範囲が増加し、許容範囲が大きくなり、完全な力制御を実現することもできます。これにより、生産サイクルが直接的に改善され、試行および試行のコストが大幅に削減されます。エラーの検証。
▋高い処理周波数により、より優れたパフォーマンスを実現
市場で一般的に使用されている「6軸力センサ+ロボット」の力制御方式の計算周期は5~10ミリ秒、つまり処理周波数は100~200Hzです。SoftForce®2.0高精度力制御アクチュエータの処理周波数は4000Hz(すなわち0.25ミリ秒)に達し、高周波シリーズモデルは8000Hzに達することができ、これは一般的なロボット力制御アクチュエータの処理周波数の4~8倍です。
▋外力の変化に追従するアクティブコンプライアントフォースコントロール
効率的な応答速度と瞬時の力のフィードバックにより、アクチュエータは外部の力に瞬時に応答し、アクティブなコンプライアンス力制御を実現できます。動作中に外力が発生した場合でも、時間内に調整できるため、プロセスがより正確になります。ワークピースの保護が向上します。
高周波かつ高速でオーバーシュートなし
高周波・高速動作においても高い出力精度を維持しつつ、「ソフトランディング」「ノーオーバーシュート」を実現し、高速かつ小さな力で部品表面に接触し、柔軟な動作を実現します。繊細で壊れやすい部品への損傷を避けるため、部品などの摘み取りや配置を行います。コンポーネント。
SoftForce®2.0 精密力制御
HFシリーズの新しいアップグレード
▋ より強力な過負荷防止機能
現場のプロセスと複数回の反復の深い理解に基づいて、成州が今年 2 月に新しくアップグレードした SoftForce®2.0 精密力制御 HF シリーズは、統合センサー設計を採用しており、その抗過負荷能力は従来のものよりも数倍高くなっています。耐久性と使いやすさをさらに向上させました。より複雑な条件に対処します。
▋小さな力と大きな出力の両方を考慮できる
高精度力制御システムSoftForce®2.0を搭載し、高ストローク・大荷重の高精度力制御スライドテーブルとプッシュロッドにより、高負荷時でも小さく正確な力を発生させることができ、同時に力も考慮することができます。時間も短くなり、出力範囲も広くなります。より大きい、すなわちより広い力のダイナミックレンジ*。
※フォースダイナミックレンジ:出力可能な最大力と最小力の比。
精密力制御は単一軸でのみ使用可能
SoftForce®2.0 精密力制御アクチュエータは、単軸で使用できるだけでなく、多軸アセンブリ ソリューションの可能性をさらに広げます。たとえば、成州テクノロジーが発売した最新の「RM成州2D同期精密力制御プラットフォーム制御システム」は、2つの成州精密力制御電動アクチュエータで構成されており、「6軸センサー+ロボット」制御方式の力を置き換えることができます。携帯電話などの内枠の精密研削やバリ取りに使用されます。
成州 2D 同期精密力制御プラットフォーム制御システム
(高精度力制御システムSoftForce®2.0搭載)
洗練された使いやすいプロフェッショナルサービス
高度な制御アルゴリズムとシンプルなデバッグプロセスにより、顧客に便利なユーザーエクスペリエンスをもたらします。低レベルのバックグラウンドを持つオペレーターでも 5 分で開始でき、まさに「プラグ アンド プレイ」です。
同時に、Chengzhou Technology の専門的で強力なアフターサービス チームは、技術的な疑問、教育、トラブルシューティング、メンテナンスなど、初回からお客様にタイムリーで包括的で安心できる技術サポートを提供できます。
成州科技は常にその境界を広げる勇敢さを持っています。堅固で革新的な技術力により、同社はよりインテリジェントで、より正確で、より互換性の高い高品質のアクチュエータ製品を継続的に発売し、半導体パッケージングとテスト、3Cオートメーション、精密製造、スマート医療およびその他の業界に高度な製品を提供しています。精密モーション制御システムやアクチュエーターなどのコアコンポーネント。
投稿日時: 2022 年 5 月 31 日